Module 5: Astrophysics & Machine Learning
This notebook teaches anomaly detection for telemetry‑style time series.
What you’ll learn
- What counts as an “anomaly” in engineering (and what does not)
- Two baseline detectors you should always try first:
- Threshold rules (engineering limits)
- Rolling z‑scores (statistical deviation)
- A robust baseline (median + MAD) that handles outliers better
- How to score a detector (precision / recall) using toy ground truth labels
Why toy data?
We generate a small dataset in code so this notebook runs anywhere (GitHub Pages build, Binder, Colab) with no downloads.
Code
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
plt.style.use("dark_background")
plt.rcParams.update(
{
"figure.dpi": 110,
"axes.titlesize": 14,
"axes.labelsize": 12,
"xtick.labelsize": 10,
"ytick.labelsize": 10,
"legend.fontsize": 10,
}
)
ACCENT = "#00d4ff"
DANGER = "#ff4d6d"
GOOD = "#7CFC00"
print("Environment ready. We'll create a toy telemetry dataset with labeled anomalies.")
Environment ready. We'll create a toy telemetry dataset with labeled anomalies.
1) What is an anomaly?
In engineering, an “anomaly” usually means:
- A sensor value is outside a safe / expected range
- A signal changes too fast or in an unexpected pattern
- A system enters a mode you did not intend (like safe‑mode)
Important: Not every weird‑looking value is a failure.
- Example: battery voltage may dip during a high‑power event (heater, comms downlink)
- Your job is to separate:
- normal but rare behavior
- from real faults
Code
# Create toy telemetry (1-minute samples over 2 days)
# Signals:
# - battery_v: mostly stable, with a brief voltage sag anomaly
# - temp_c: mostly stable, with a spike anomaly
# - rate_dps: angular rate, with a step change anomaly
# - bus_current_a: current draw (used mainly to show gaps / missing samples)
rng = np.random.default_rng(42)
t = pd.date_range("2026-01-01", periods=2 * 24 * 60, freq="1min", tz="UTC")
N = len(t)
battery_v = 28.0 + 0.03 * rng.normal(size=N)
temp_c = 22.0 + 0.20 * rng.normal(size=N)
rate_dps = 0.05 + 0.01 * rng.normal(size=N)
bus_current_a = 8.0 + 0.15 * rng.normal(size=N)
# Labels (ground truth) — we can score detectors against these.
labels = {
"battery_sag": np.zeros(N, dtype=bool),
"temp_spike": np.zeros(N, dtype=bool),
"rate_step": np.zeros(N, dtype=bool),
"missing_data": np.zeros(N, dtype=bool),
}
# Inject anomalies
battery_start = int(N * 0.60)
battery_end = battery_start + 25
battery_v[battery_start:battery_end] -= 0.9
labels["battery_sag"][battery_start:battery_end] = True
temp_start = int(N * 0.35)
temp_end = temp_start + 10
temp_c[temp_start:temp_end] += 9.0
labels["temp_spike"][temp_start:temp_end] = True
rate_start = int(N * 0.75)
rate_end = rate_start + 120
rate_dps[rate_start:rate_end] += 0.25
labels["rate_step"][rate_start:rate_end] = True
# Add some missing samples (simulating downlink gaps)
missing_idx = rng.choice(N, size=40, replace=False)
labels["missing_data"][missing_idx] = True
battery_v[missing_idx] = np.nan
temp_c[missing_idx] = np.nan
rate_dps[missing_idx] = np.nan
bus_current_a[missing_idx] = np.nan
units = {
"battery_v": "V",
"temp_c": "°C",
"rate_dps": "deg/s",
"bus_current_a": "A",
}
df = pd.DataFrame(
{
"battery_v": battery_v,
"temp_c": temp_c,
"rate_dps": rate_dps,
"bus_current_a": bus_current_a,
},
index=t,
)
print(df.head(3))
print("Missing rows:", int(df.isna().any(axis=1).sum()))
battery_v temp_c rate_dps bus_current_a
2026-01-01 00:00:00+00:00 28.009142 22.061116 0.074112 8.132046
2026-01-01 00:01:00+00:00 27.968800 22.178760 0.055664 8.259748
2026-01-01 00:02:00+00:00 28.022514 22.150477 0.044043 7.912429
Missing rows: 40
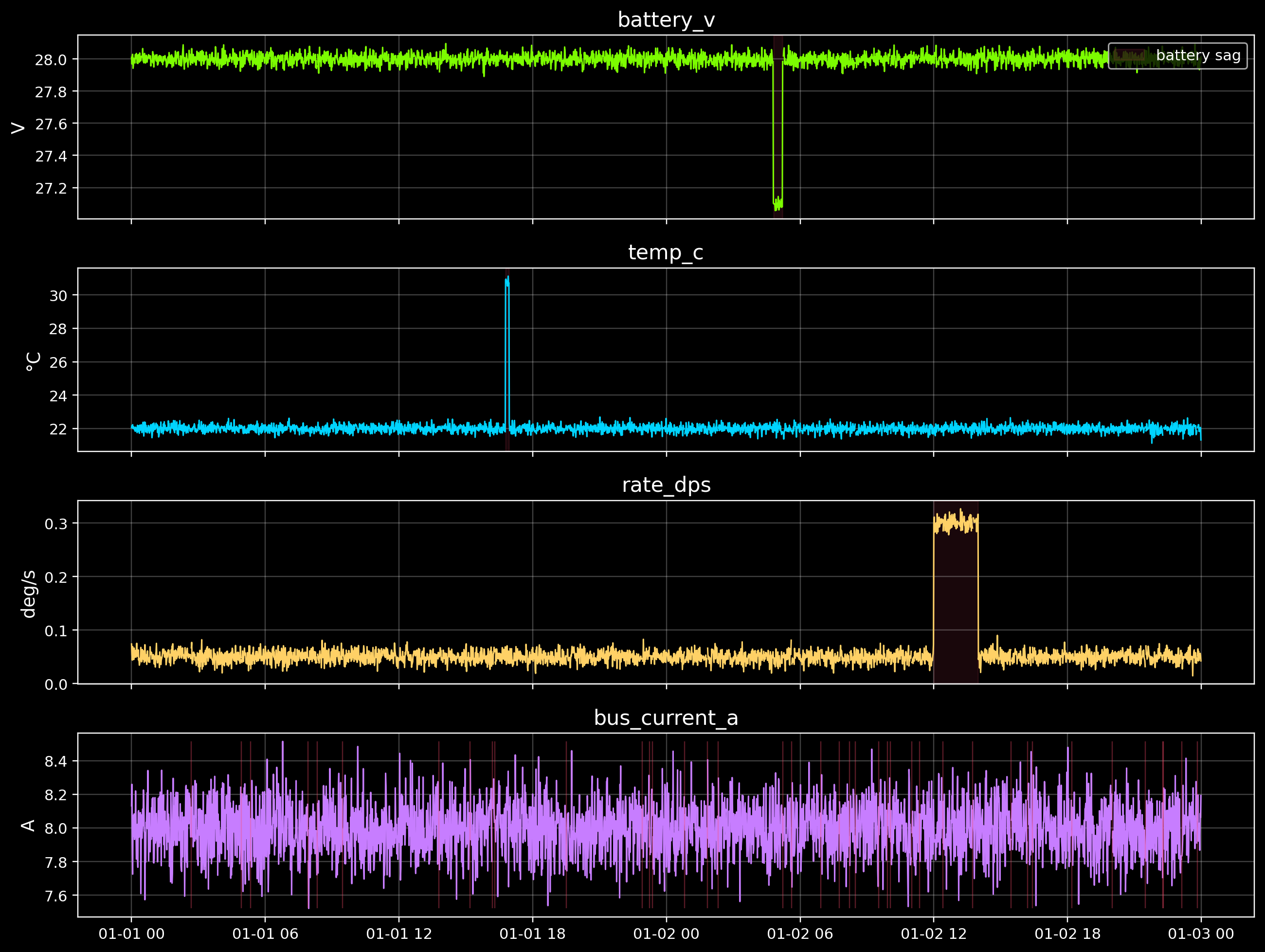
2) Visualize the telemetry (with anomaly windows)
First step in anomaly detection is simple: look at the data.
We’ll plot each signal and mark where we injected the toy anomalies.
Code
def span(ax, start_idx: int, end_idx: int, color: str, label: str):
ax.axvspan(df.index[start_idx], df.index[end_idx - 1], color=color, alpha=0.10, label=label)
fig, axes = plt.subplots(4, 1, figsize=(12, 9), sharex=True)
axes[0].plot(df.index, df["battery_v"], color=GOOD, lw=1.0)
axes[0].set_title("battery_v")
axes[0].set_ylabel(units["battery_v"])
axes[0].grid(True, alpha=0.25)
span(axes[0], battery_start, battery_end, DANGER, "battery sag")
axes[1].plot(df.index, df["temp_c"], color=ACCENT, lw=1.0)
axes[1].set_title("temp_c")
axes[1].set_ylabel(units["temp_c"])
axes[1].grid(True, alpha=0.25)
span(axes[1], temp_start, temp_end, DANGER, "temp spike")
axes[2].plot(df.index, df["rate_dps"], color="#ffd166", lw=1.0)
axes[2].set_title("rate_dps")
axes[2].set_ylabel(units["rate_dps"])
axes[2].grid(True, alpha=0.25)
span(axes[2], rate_start, rate_end, DANGER, "rate step")
axes[3].plot(df.index, df["bus_current_a"], color="#c77dff", lw=1.0)
axes[3].set_title("bus_current_a")
axes[3].set_ylabel(units["bus_current_a"])
axes[3].grid(True, alpha=0.25)
# Mark missing samples as vertical tick marks on the last plot (gaps matter)
missing_times = df.index[df.isna().any(axis=1)]
axes[3].vlines(missing_times, ymin=df["bus_current_a"].min(), ymax=df["bus_current_a"].max(), color=DANGER, alpha=0.35, lw=0.8)
axes[0].legend(loc="upper right")
plt.tight_layout()
plt.show()
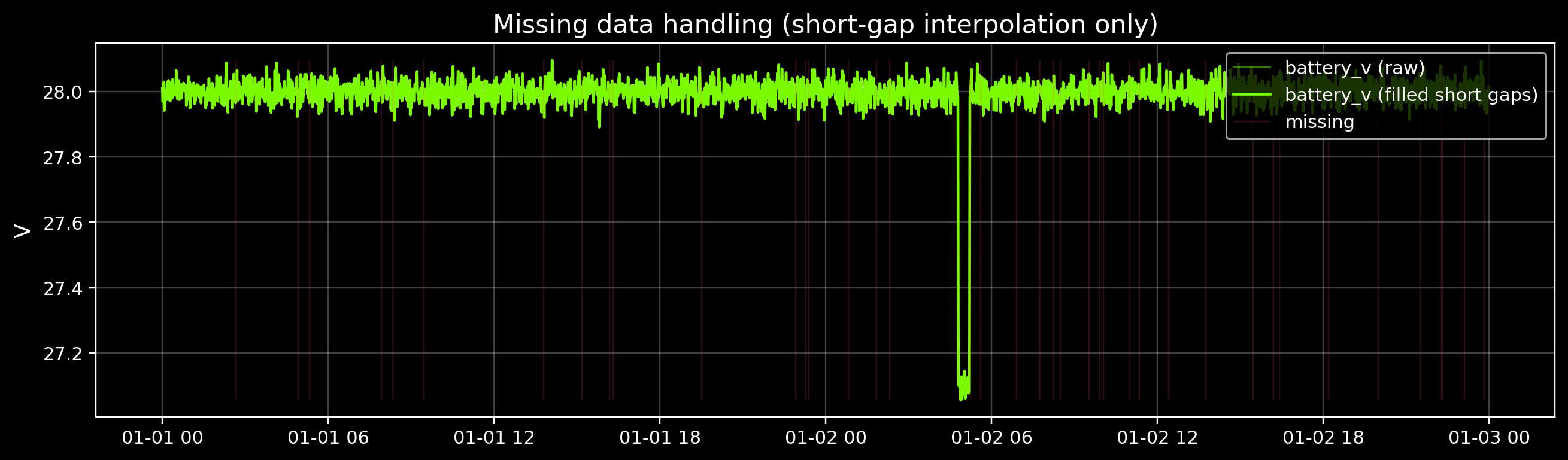
3) Preprocess: handle missing data (carefully)
Missing samples are common in spacecraft telemetry. For most detectors, you have three options:
- Drop missing rows (simple, but you lose time context)
- Forward fill (dangerous if the signal changes quickly)
- Interpolate short gaps (good default for small gaps)
We’ll interpolate only short gaps, and we’ll keep a mask of which timestamps were originally missing.
Code
missing_mask = df.isna().any(axis=1)
# Interpolate only short gaps (up to 3 minutes)
df_filled = df.interpolate(limit=3)
print("Missing timestamps:", int(missing_mask.sum()))
print("Remaining missing after short-gap interpolation:", int(df_filled.isna().any(axis=1).sum()))
# Quick visual: raw vs filled for one signal
sig = "battery_v"
fig, ax = plt.subplots(figsize=(12, 3.6))
ax.plot(df.index, df[sig], color=GOOD, alpha=0.45, lw=1.0, label=f"{sig} (raw)")
ax.plot(df_filled.index, df_filled[sig], color=GOOD, lw=1.5, label=f"{sig} (filled short gaps)")
ax.vlines(df.index[missing_mask], ymin=np.nanmin(df[sig]), ymax=np.nanmax(df[sig]), color=DANGER, alpha=0.18, lw=0.8, label="missing")
ax.set_title("Missing data handling (short-gap interpolation only)")
ax.set_ylabel(units[sig])
ax.grid(True, alpha=0.25)
ax.legend(loc="upper right")
plt.tight_layout()
plt.show()
Missing timestamps: 40
Remaining missing after short-gap interpolation: 0
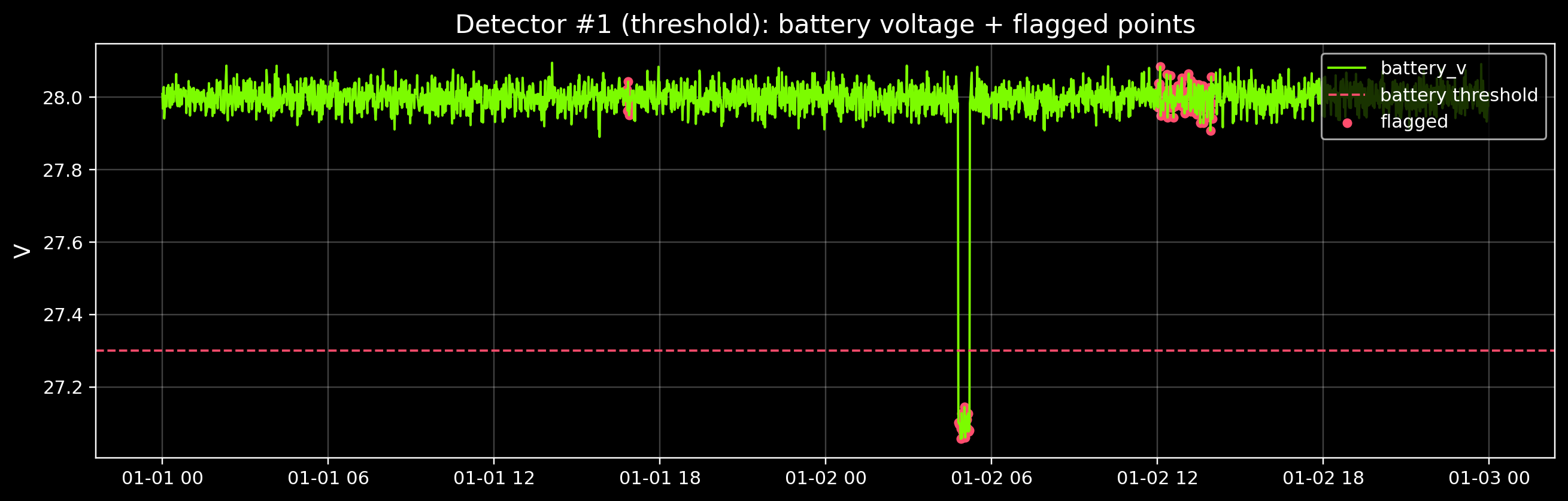
4) Detector #1 — Threshold rules (engineering limits)
Threshold rules are simple and explainable:
- “Battery voltage below 27.3 V is suspicious”
- “Temperature above 27 °C is suspicious”
- “Rate above 0.15 deg/s is suspicious”
Real teams start with these rules because they’re easy to review and audit.
Code
thr = {
"battery_v_low": 27.3,
"temp_c_high": 27.0,
"rate_dps_high": 0.15,
}
pred_threshold = (
(df_filled["battery_v"] < thr["battery_v_low"])
| (df_filled["temp_c"] > thr["temp_c_high"])
| (df_filled["rate_dps"] > thr["rate_dps_high"])
).fillna(False)
print("Threshold flags:", int(pred_threshold.sum()))
# Visualize flags on top of the battery signal (one example)
fig, ax = plt.subplots(figsize=(12, 3.9))
ax.plot(df.index, df_filled["battery_v"], color=GOOD, lw=1.25, label="battery_v")
ax.axhline(thr["battery_v_low"], color=DANGER, lw=1.2, ls="--", label="battery threshold")
ax.scatter(df.index[pred_threshold], df_filled.loc[pred_threshold, "battery_v"], color=DANGER, s=18, label="flagged")
ax.set_title("Detector #1 (threshold): battery voltage + flagged points")
ax.set_ylabel(units["battery_v"])
ax.grid(True, alpha=0.25)
ax.legend(loc="upper right")
plt.tight_layout()
plt.show()
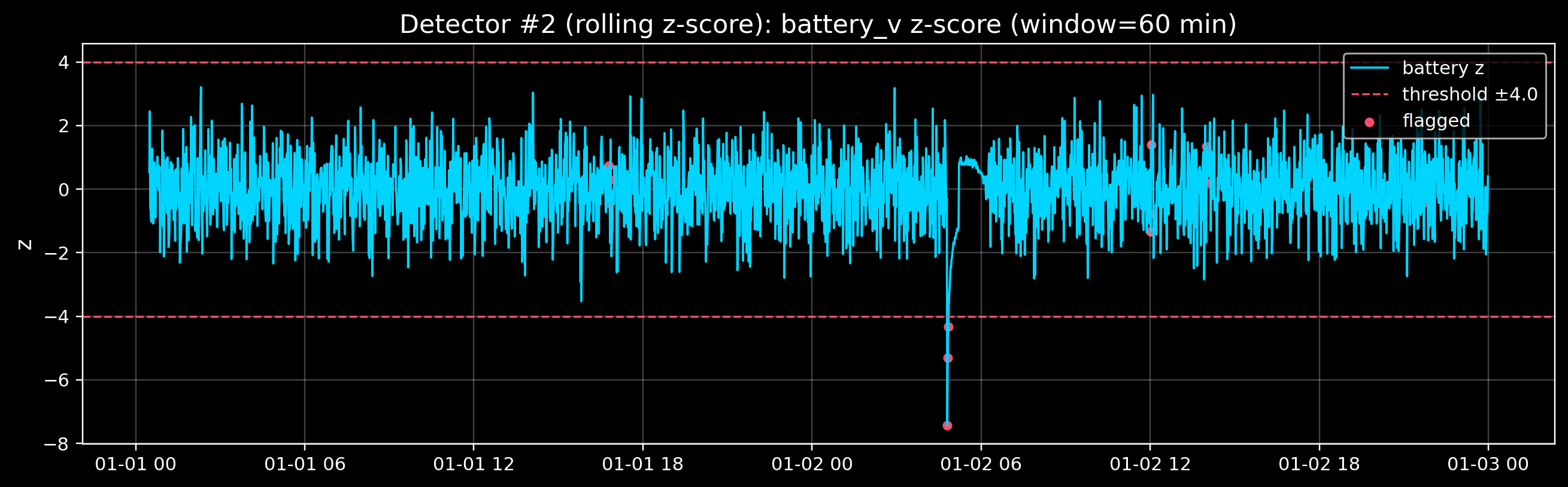
5) Detector #2 — Rolling z-scores (statistical deviation)
A z-score answers: “How many standard deviations away from normal is this sample?”
For time series, we usually compute it relative to a rolling window: - rolling mean - rolling standard deviation
This adapts to slow changes, but it can also hide slow drift (we’ll discuss that later).
Code
def rolling_zscore(x: pd.Series, window: int, min_periods: int = 30) -> pd.Series:
mu = x.rolling(window=window, min_periods=min_periods).mean()
sigma = x.rolling(window=window, min_periods=min_periods).std(ddof=0)
sigma = sigma.replace(0, np.nan)
return (x - mu) / sigma
window = 60 # 60 minutes
z_batt = rolling_zscore(df_filled["battery_v"], window=window)
z_temp = rolling_zscore(df_filled["temp_c"], window=window)
z_rate = rolling_zscore(df_filled["rate_dps"], window=window)
z_thr = 4.0
pred_roll_z = ((z_batt.abs() > z_thr) | (z_temp.abs() > z_thr) | (z_rate.abs() > z_thr)).fillna(False)
print("Rolling z-score flags:", int(pred_roll_z.sum()))
# Visual: z-score for one signal + flagged points
fig, ax = plt.subplots(figsize=(12, 3.8))
ax.plot(df.index, z_batt, color=ACCENT, lw=1.2, label="battery z")
ax.axhline(+z_thr, color=DANGER, lw=1.1, ls="--")
ax.axhline(-z_thr, color=DANGER, lw=1.1, ls="--", label=f"threshold ±{z_thr:.1f}")
ax.scatter(df.index[pred_roll_z], z_batt[pred_roll_z], color=DANGER, s=18, label="flagged")
ax.set_title(f"Detector #2 (rolling z-score): battery_v z-score (window={window} min)")
ax.set_ylabel("z")
ax.grid(True, alpha=0.25)
ax.legend(loc="upper right")
plt.tight_layout()
plt.show()
Rolling z-score flags: 13
7) Score the detectors (precision / recall)
Because we injected toy anomalies, we have a ground truth label.
We’ll score detectors on non-missing timestamps and treat “anomaly” as: - battery sag OR temp spike OR rate step
This is simplified, but it teaches the evaluation loop.
Code
y_true = labels["battery_sag"] | labels["temp_spike"] | labels["rate_step"]
# Score only where we actually have data
valid = ~missing_mask.to_numpy()
def score_detector(y_true_bool: np.ndarray, y_pred_bool: np.ndarray, valid_mask: np.ndarray) -> dict:
y_true_v = y_true_bool & valid_mask
y_pred_v = y_pred_bool & valid_mask
tp = int(np.sum(y_true_v & y_pred_v))
fp = int(np.sum(~y_true_v & y_pred_v))
fn = int(np.sum(y_true_v & ~y_pred_v))
tn = int(np.sum(~y_true_v & ~y_pred_v))
precision = tp / (tp + fp) if (tp + fp) else 0.0
recall = tp / (tp + fn) if (tp + fn) else 0.0
f1 = (2 * precision * recall) / (precision + recall) if (precision + recall) else 0.0
return {
"tp": tp,
"fp": fp,
"fn": fn,
"tn": tn,
"precision": precision,
"recall": recall,
"f1": f1,
}
y_pred = {
"Threshold rules": pred_threshold.to_numpy(),
f"Rolling z (w={window})": pred_roll_z.to_numpy(),
f"Robust z (w={window})": pred_robust.to_numpy(),
}
rows = []
for name, yp in y_pred.items():
s = score_detector(y_true, yp, valid)
s["detector"] = name
rows.append(s)
df_scores = pd.DataFrame(rows).set_index("detector")
df_scores[["precision", "recall", "f1"]] = df_scores[["precision", "recall", "f1"]].round(3)
display(df_scores)
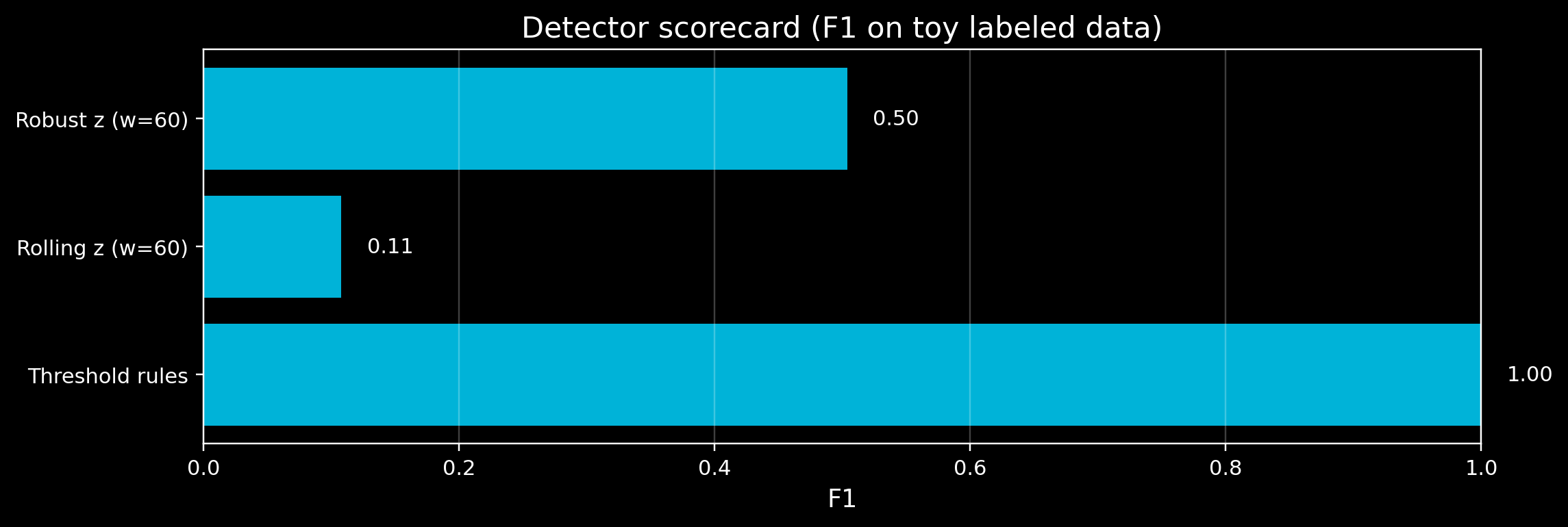
# Visual scorecard
fig, ax = plt.subplots(figsize=(10.5, 3.6))
ax.barh(df_scores.index, df_scores["f1"], color=ACCENT, alpha=0.85)
ax.set_xlim(0, 1)
ax.set_title("Detector scorecard (F1 on toy labeled data)")
ax.set_xlabel("F1")
ax.grid(True, axis="x", alpha=0.25)
for i, v in enumerate(df_scores["f1"].values):
ax.text(v + 0.02, i, f"{v:.2f}", va="center")
plt.tight_layout()
plt.show()
| detector |
|
|
|
|
|
|
|
| Threshold rules |
153 |
0 |
0 |
2727 |
1.000 |
1.000 |
1.000 |
| Rolling z (w=60) |
9 |
4 |
144 |
2723 |
0.692 |
0.059 |
0.108 |
| Robust z (w=60) |
63 |
34 |
90 |
2693 |
0.649 |
0.412 |
0.504 |
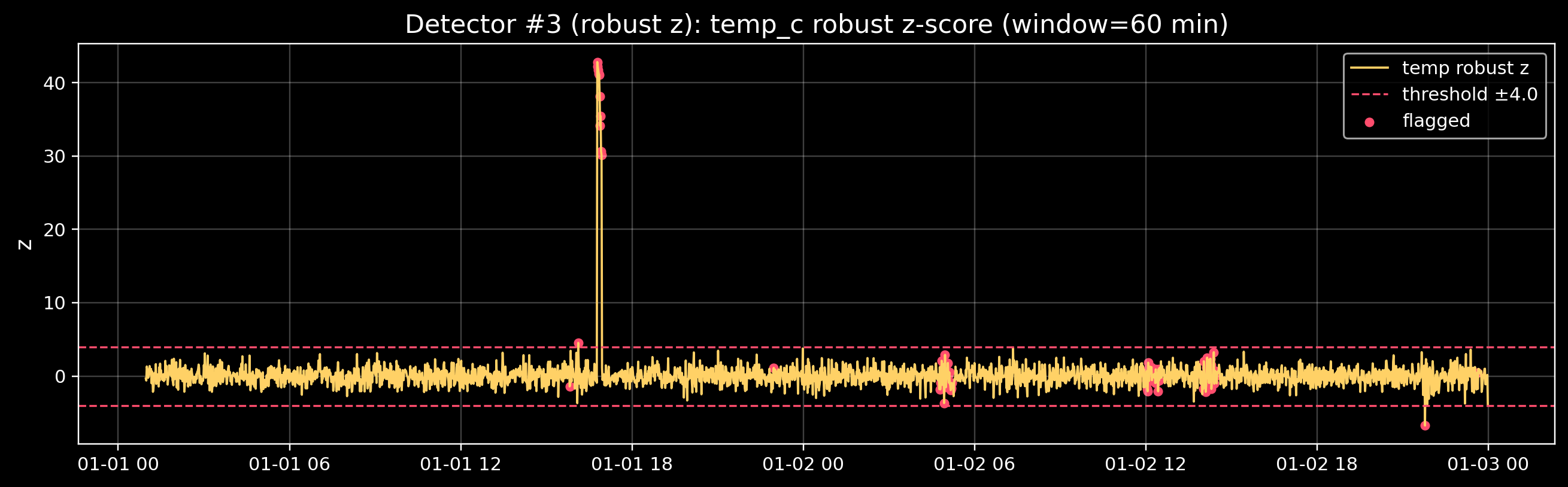
8) What can I do next?
- Exercise A (trade-offs):
- Change thresholds (
thr) and watch precision/recall change.
- Exercise B (window size):
- Change
window from 60 → 20 → 180.
- When do you start missing the step change? When do false alarms increase?
- Exercise C (missing data):
- Increase the number of missing samples.
- What breaks first? (Plots, detectors, scoring?)
Next notebook
In 03_Forecasting_Basics.ipynb, we’ll build simple baselines to predict a time series and quantify error.